Bramka Modbus – konfiguracja Modbus RTU/ASCII ↔ Modbus TCP w praktyce BMS i PLC

- Dlaczego konfiguracja bramki Modbus ma realny wpływ na stabilność BMS?
- Kiedy potrzebujesz bramki Modbus RTU/ASCII ↔ Modbus TCP?
- Start: podłączenie, dostęp WWW i pierwsze logowanie
- Tryby pracy: RTU Master/Slave i ASCII Master/Slave – jak wybrać?
- Mode Settings: routing po IP/porcie, Smart Mode i timeouty
- Slave ID Mapping: auto-route, manual i offset (Visual ID ↔ Real ID)
- Priority Control: priorytety zapytań i krytyczne rejestry
- Testy i diagnostyka: jak szybko znaleźć wąskie gardło
- FAQ
Dlaczego konfiguracja bramki Modbus ma realny wpływ na stabilność BMS?
W projektach BMS i automatyki przemysłowej Modbus jest „językiem wspólnym” dla liczników energii, sterowników HVAC, regulatorów i wielu urządzeń wykonawczych. Problem w tym, że sama obecność protokołu nie gwarantuje stabilnej komunikacji: o jakości działania systemu w praktyce decydują szczegóły konfiguracji – od parametrów RS-485, przez mapowanie ID, aż po priorytety i timeouty.
Dlatego dobrze dobrana i poprawnie skonfigurowana bramka Modbus (Modbus Gateway) jest często elementem, który „spina” system i ogranicza ryzyko losowych timeoutów, kolejek zapytań, a w konsekwencji alarmów i błędnych odczytów. W tym poradniku przechodzimy krok po kroku przez ustawienia, które w praktyce robią największą różnicę.
Jeżeli szukasz sprawdzonego urządzenia do konwersji Modbus RTU ↔ Modbus TCP, zobacz: GW1101-1D(RS-485) – bramka Modbus RTU/ASCII na Modbus TCP.
Kiedy potrzebujesz bramki Modbus RTU/ASCII ↔ Modbus TCP?
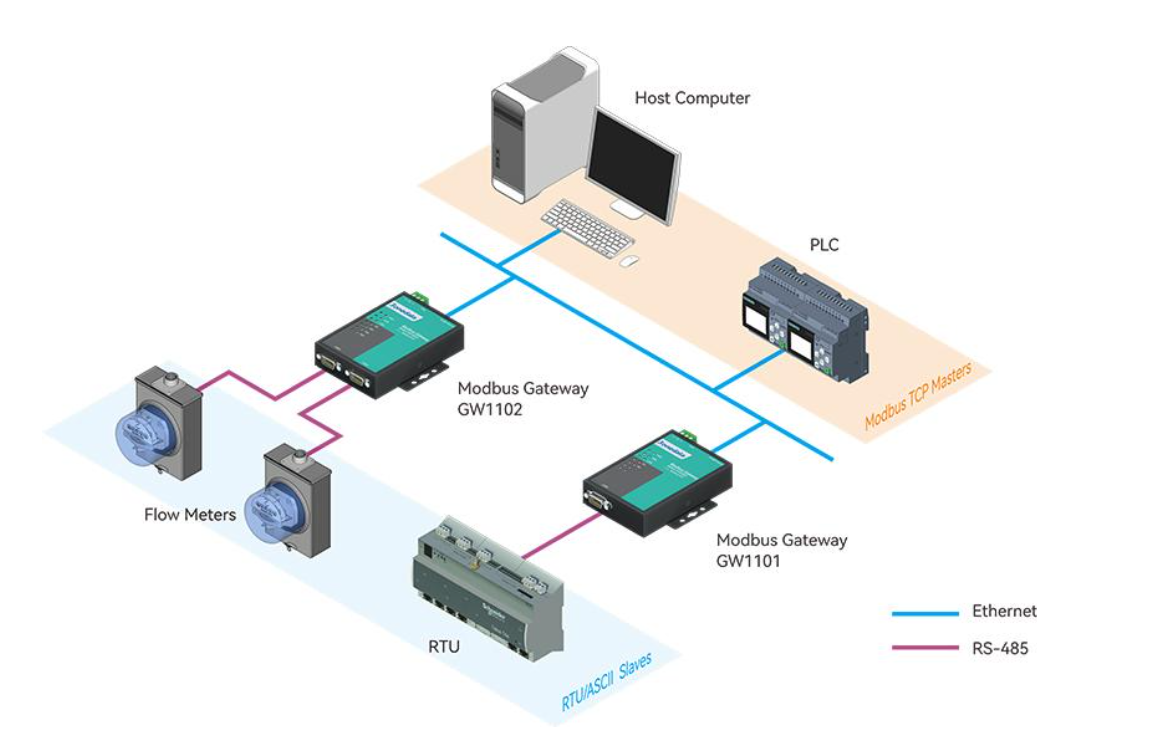
Najczęstszy scenariusz w BMS wygląda tak: serwer/sterownik nadrzędny działa w sieci IP i „mówi” Modbus TCP, natomiast urządzenia polowe (liczniki, regulatory, czujniki) pracują na RS-485 w Modbus RTU. Bramka Modbus pełni wtedy rolę tłumacza: z jednej strony przyjmuje zapytania TCP, z drugiej wysyła je po RS-485 do właściwego slave’a i odsyła odpowiedź.
Drugi częsty przypadek to integracja „w drugą stronę”: masz istniejącą infrastrukturę RS-485 i urządzenia, które oczekują Modbus RTU/ASCII, ale chcesz wystawić dane do systemu IP (SCADA/BMS/PLC) bez przepinania całej magistrali.
W praktyce bramki wybiera się też wtedy, gdy potrzebujesz porządku w adresacji (mapowanie ID), kontroli priorytetów (krytyczne rejestry), albo gdy chcesz ograniczyć liczbę zapytań do urządzeń wolnych (Smart Mode i buforowanie odpowiedzi).
Start: podłączenie, dostęp WWW i pierwsze logowanie
1) Podłączenie fizyczne i montaż
Podłącz Ethernet do sieci (lub bezpośrednio do laptopa na czas uruchomienia) oraz RS-485 do magistrali Modbus RTU. Standardowo urządzenia z tej serii są przewidziane do montażu na biurku lub ścianie, natomiast w szafie sterowniczej często stosuje się montaż na szynie DIN przez adapter/uchwyt – dzięki temu bramka zachowuje porządek instalacyjny jak typowe komponenty automatyki.
2) Ustaw IP komputera i wejdź do panelu WWW
Przy pierwszej konfiguracji najprościej ustawić komputer w tej samej podsieci co urządzenie. Domyślnie panel WWW bramki jest dostępny pod adresem http://192.168.1.254, a przy konfiguracji lokalnej IP komputera powinno być w tym samym segmencie (np. 192.168.1.x). W części urządzeń spotkasz też tryb Dual IP, gdzie drugi port Ethernet ma osobny adres (często 192.168.8.254). Zaloguj się danymi admin/admin i zwróć uwagę na wybór typu urządzenia Modbus Gateway w prawym górnym rogu interfejsu.
Jeśli wdrażasz bramkę w istniejącej sieci obiektowej, ustaw docelowe IP już na starcie i od razu dopilnuj: brama domyślna, DNS (jeśli wymagany) i reguły routingu. Unikniesz sytuacji „działa lokalnie, nie działa z serwera BMS”.
Tryby pracy: RTU Master/Slave i ASCII Master/Slave – jak wybrać?
W panelu Modbus Gateway wybierasz tryb pracy osobno dla portu szeregowego. Do dyspozycji są cztery warianty: RTU Master, RTU Slave, ASCII Master, ASCII Slave. Dobór jest prosty, jeśli odpowiesz sobie na jedno pytanie: kto jest masterem po stronie RS-485?
- RTU Slave – najczęstszy w BMS: po Ethernet masz mastera TCP (BMS/SCADA), a po RS-485 urządzenia slave RTU.
- RTU Master – gdy po RS-485 działa master RTU (np. sterownik/PLC), a po Ethernet chcesz odpytywać TCP slave’y.
- ASCII Master / ASCII Slave – analogicznie, ale dla Modbus ASCII (rzadziej spotykane w nowym BMS, czasem w legacy).
Warto też wiedzieć, że w zależności od trybu bramka obsłuży równoległe sesje TCP: w trybach slave (RTU/ASCII Slave) potrafi pracować z wieloma masterami TCP równocześnie, a w trybach master (RTU/ASCII Master) potrafi łączyć się z wieloma TCP slave. To ma znaczenie, jeśli np. dwa systemy nadrzędne muszą czytać te same dane (BMS + EMS).
Mode Settings: routing po IP/porcie, Smart Mode i timeouty
Podstawowa konfiguracja jest w sekcji Protocol Settings → Mode Settings. Tu ustawiasz tryb pracy portu, a także (opcjonalnie) routing po adresie IP lub porcie TCP – czyli które zapytania mają trafić na dany port szeregowy. To szczególnie przydatne, gdy masz kilka portów RS-485 lub chcesz wydzielić ruch z konkretnego systemu nadrzędnego.
Smart Mode (inteligentne uczenie zapytań)
Smart Mode potrafi „nauczyć się” komend Modbus i buforować odpowiedzi, żeby master mógł je odczytać bez ciągłego obciążania slave’ów. W praktyce bywa to pomocne przy wolnych urządzeniach, długich liniach RS-485 i systemach, które zbyt agresywnie odpytywałyby rejestry. Kluczowe ustawienia to m.in. interwał odpytywania i czasy starzenia danych.
Timeouty i opóźnienia – dlaczego to krytyczne w RS-485?
Jeśli urządzenie RTU nie odpowiada na kilka zapytań naraz (co jest typowe), kolejka żądań może się „zatykać”. Dlatego sensownie ustawione Response timeout oraz Inter-Frame Delay potrafią stabilizować komunikację: nie masz lawiny retry i nie blokujesz magistrali. Dodatkowo w „Advanced Settings” znajdziesz m.in. opóźnienie startowe (Initial Delay), co pomaga po restarcie zasilania uniknąć „zimnego startu” całej komunikacji naraz.
Slave ID Mapping: auto-route, manual i offset (Visual ID ↔ Real ID)
To miejsce, które najczęściej „ratuje” wdrożenia. W sekcji Protocol Settings → Slave ID Mapping konfigurujesz, jak zapytania Modbus mają trafić do właściwego slave’a – zarówno po TCP, jak i po RS-485. Masz do wyboru tryb automatyczny (Automatic Route) albo manualny.
Manualny tryb daje największą kontrolę, bo pozwala mapować Visual ID widziane przez mastera na Real ID urządzenia (zależność offsetem). To jest świetne, gdy w obiekcie nie możesz zmienić adresów fizycznych (bo ktoś już je opisal), ale chcesz uporządkować adresację „od strony BMS” bez ryzyka przerw serwisowych.
Chcesz, aby BMS odpytywał urządzenia jako ID 10–20, ale fizycznie na magistrali masz ID 1–11. Ustawiasz offset tak, żeby Real ID = Visual ID + offset. Dzięki temu nie ruszasz adresów urządzeń, a BMS ma „czyste” ID.
W efekcie wdrożenie jest szybsze, a ryzyko pomyłek w dokumentacji spada.
Priority Control: priorytety zapytań i krytyczne rejestry
W RS-485 wiele urządzeń slave przetwarza żądania sekwencyjnie. Gdy ruch jest duży, zapytania potrafią się „piętrzyć”, a to boli najbardziej tam, gdzie masz rejestry krytyczne (np. alarmy, zabezpieczenia, sygnały sterujące). Dlatego warto skorzystać z Protocol Settings → Priority Control i nadać priorytet: po porcie TCP, po adresie mastera albo nawet po konkretnych żądaniach (Slave ID / Function Code / Data).
W praktyce w BMS robi się tak: monitorowanie „twardych” alarmów dostaje priorytet, a odczyty „miękkie” (np. statystyki, trendy) są obsługiwane w tle. Efekt to krótszy czas reakcji systemu i mniej fałszywych timeoutów w krytycznych momentach.
Testy i diagnostyka: jak szybko znaleźć wąskie gardło
Najlepszy test po konfiguracji to taki, który symuluje realne obciążenie: kilka urządzeń, typowe cykle odpytywania i zapis do rejestrów. Jeśli coś „nie trzyma”, zacznij od podstaw: parametry portu (baud/parity/stop bits), terminacja i polaryzacja RS-485, unikalne ID slave, a dopiero potem wchodź w priorytety i mapowania.
W samym urządzeniu warto zerkać w liczniki błędów portu szeregowego (Frame/Parity/Overrun/Break). Jeśli rosną – to zwykle oznacza, że problem jest fizyczny (okablowanie, zakłócenia, różnice prędkości) albo parametry transmisji są niedopasowane.
Jeśli chcesz, mogę przygotować „mini-checklistę wdrożeniową” pod BMS (RS-485: topologia, terminacja, ekran; Modbus: function codes, retry/backoff; gateway: timeouty i priorytety) i dopasować ją do Twoich najczęstszych przypadków z GSC.
FAQ – bramka Modbus w BMS i automatyce
Czy bramka Modbus zastępuje sterownik BMS?
Nie – bramka jest urządzeniem pośredniczącym do konwersji i routingu komunikacji, a logika sterowania pozostaje po stronie BMS/PLC.
Jaki tryb jest najczęściej używany w BMS?
Najczęściej RTU Slave, bo BMS/SCADA działa jako Modbus TCP master, a urządzenia polowe są Modbus RTU slave na RS-485.
Po co jest Slave ID Mapping?
Do uporządkowania routingu i adresacji: możesz mapować Visual ID na Real ID i nie ruszać fizycznych adresów urządzeń w obiekcie.
Kiedy warto użyć Priority Control?
Gdy masz dużo zapytań i część z nich jest krytyczna (alarmy/sterowanie). Priorytety skracają czas reakcji i ograniczają kolejki.
Dlaczego Modbus RTU potrafi „timeoutować” mimo poprawnego okablowania?
Najczęściej przez zbyt agresywne odpytywanie, źle dobrane timeouty lub kolejkę żądań do wolnego slave’a – tu pomaga tuning gateway’a.
Jaką bramkę wybrać do typowego RTU ↔ TCP?
W wielu wdrożeniach wystarcza 1× RS-485/422 + 1× Ethernet, czyli np. GW1101-1D(RS-485) – reszta zależy od liczby segmentów i portów.
Napisz, jakie masz urządzenia (liczniki/sterowniki), ile slave’ów na RS-485 i jaki system nadrzędny (BMS/PLC/SCADA). Dobierzemy bramkę i ustawienia (ID mapping, priorytety, timeouty).
Zobacz GW1101-1D(RS-485) Skontaktuj się z ekspertem-P1-250x250h.png "GW1101-1D(RS-485) - Przemysłowa brama Modbus RTU/ASCII na Modbus TCP z 1 portem RS-485, -40°C do 75°C")
-3-250x250w.png "GW1101-1D(RS-485) - Przemysłowa brama Modbus RTU/ASCII na Modbus TCP z 1 portem RS-485, -40°C do 75°C")